Apibrėžimas:Kūno kinetinė energija yra jo transliacinio judėjimo energija.
Jei ramybės būseną kūną veikia išorinė jėga, pastarasis įgauna tam tikrą greitį ir pats gali atlikti darbą. Ši darbų atsarga vadinama kinetinė energija kūnai. Užrašykime materialaus taško judėjimo lygtį:
Kur  - gaunama jėga. Padauginkime judėjimo lygtį skaliariai iš
- gaunama jėga. Padauginkime judėjimo lygtį skaliariai iš  , Tada
, Tada

Dešinėje lygties pusėje gavome elementarų darbą, kairėje - išraišką, kurią galima konvertuoti į viso diferencialo formą:
Dėl to mes turime  , t.y. elementarus darbas, atliktas jėga ,lygus vertės prieaugiui
, t.y. elementarus darbas, atliktas jėga ,lygus vertės prieaugiui  , nustatomas iki savavališkos konstantos. Pasirodo, jėga atlieka tam tikrą darbą, o kūno kinetinė energija padidėja tiek pat (įprastas pavadinimas T arba W giminės. ).
Esant neigiamam jėgos darbui, mažėja kūno kinetinė energija: energija eikvojama veikiančiai jėgai įveikti. Paprastai manoma, kad ramybės būsenos kūnas neturi kinetinės energijos, todėl laikoma, kad savavališka konstanta yra lygi nuliui:
, nustatomas iki savavališkos konstantos. Pasirodo, jėga atlieka tam tikrą darbą, o kūno kinetinė energija padidėja tiek pat (įprastas pavadinimas T arba W giminės. ).
Esant neigiamam jėgos darbui, mažėja kūno kinetinė energija: energija eikvojama veikiančiai jėgai įveikti. Paprastai manoma, kad ramybės būsenos kūnas neturi kinetinės energijos, todėl laikoma, kad savavališka konstanta yra lygi nuliui:  .
.
§17. Potenciali energija.
Apibrėžimas:Potenciali energija – mechaninės sistemos energijos dalis, kuri priklauso tik nuo jos konfigūracijos, t.y. apie santykinę visų sistemos dalelių padėtį ir vietą išoriniame potencialo lauke.
Potencialios energijos praradimas perkeliant sistemą iš savavališkos padėties „1“ į kitą „2“ padėtį matuojamas darbu A 12, kurį atlieka visas potencialas: sistemą veikiančios vidinės ir išorinės jėgos:
U(1) U(2) = A 12 arba U = A 12 ,
Kur U = U(2) U(1) - mechaninės sistemos potencinės energijos pokyčiai,
U(1), U(2) mechaninės sistemos potencialios energijos reikšmės „1“ ir „2“ padėtyse.
Atitinkamai, potencialių jėgų darbas su nedideliu sistemos konfigūracijos pasikeitimu yra A = dU.
Šie ryšiai galioja stacionaraus (nuo laiko nepriklausomo) išorinio potencialo lauko atveju. Paprasčiausiu atveju, kai materialus taškas yra išoriniame potencialo lauke, jėga, kuria šis laukas veikia tašką, apskaičiuojama pagal formulę:
Kur  vadinamas skaliarinės funkcijos (šiuo atveju potencialios energijos) gradientu. Gradientas yra vektorinis dydis, nukreiptas į didėjančias funkcijos reikšmes U. Aukščiau pateiktoje formulėje yra ženklas „“, kuris rodo, kad jėga nukreipta į funkcijos reikšmių sumažėjimą U.
vadinamas skaliarinės funkcijos (šiuo atveju potencialios energijos) gradientu. Gradientas yra vektorinis dydis, nukreiptas į didėjančias funkcijos reikšmes U. Aukščiau pateiktoje formulėje yra ženklas „“, kuris rodo, kad jėga nukreipta į funkcijos reikšmių sumažėjimą U.
Akivaizdu, kad atvirkštinis ryšys, leidžiantis apskaičiuoti potencialios energijos vertę pagal žinomą potencialios jėgos išraišką
 .
.
Pateikta formulė leidžia nustatyti aiškias potencialios energijos išraiškas ypatingais atvejais. Skaičiuodami šį integralą, jie stengiasi pasirinkti vieną iš ribų, kad potencinė energija nagrinėjamu momentu buvo lygus nuliui.
1 pavyzdys.
Gravitacinės sąveikos tarp dviejų kūnų jėga lygi  ,
,
Su darbo samprata glaudžiai susijusi ir kita pamatinė fizinė sąvoka – energijos sąvoka. Kadangi mechanika tiria, pirma, kūnų judėjimą ir, antra, kūnų sąveiką tarpusavyje, įprasta atskirti dvi mechaninės energijos rūšis: kinetinė energija, kurį sukelia kūno judėjimas, ir potencinė energija, kurią sukelia kūno sąveika su kitais kūnais.
Kinetinė energija mechaninė sistema vadinama energijapriklausomai nuo šios sistemos taškų judėjimo greičio.
Kinetinės energijos išraišką galima rasti nustačius materialiame taške veikiančios rezultatinės jėgos darbą. Remdamiesi (2.24), parašome gaunamosios jėgos elementaraus darbo formulę:
Nes  , tada dA = mυdυ. (2.25)
, tada dA = mυdυ. (2.25)
Norėdami rasti darbą, kurį atlieka atstojamoji jėga, kai kūno greitis pasikeičia nuo υ 1 iki υ 2, integruojame išraišką (2.29):
 (2.26)
(2.26)
Kadangi darbas yra energijos perdavimo iš vieno kūno į kitą matas, tai
Remdamiesi (2.30), rašome, kad kiekis  yra kinetinė energija
yra kinetinė energija
kūnas:  iš kur vietoj (1.44) gauname
iš kur vietoj (1.44) gauname
 (2.27)
(2.27)
(2.30) formule išreikšta teorema paprastai vadinama kinetinės energijos teorema . Pagal jį kūną (ar kūnų sistemą) veikiančių jėgų darbas yra lygus šio kūno (arba kūnų sistemos) kinetinės energijos pokyčiui.
Iš kinetinės energijos teoremos išplaukia fizinė kinetinės energijos reikšmė : Kūno kinetinė energija yra lygi darbui, kurį jis gali atlikti, sumažindamas savo greitį iki nulio. Kuo daugiau kinetinės energijos „rezervas“ turi kūnas, tuo daugiau darbo jis gali atlikti.
Sistemos kinetinė energija yra lygi materialių taškų, iš kurių ši sistema susideda, kinetinių energijų sumai:
 (2.28)
(2.28)
Jei visų kūną veikiančių jėgų darbas yra teigiamas, tada kūno kinetinė energija didėja, jei darbas neigiamas, kinetinė energija mažėja.
Akivaizdu, kad visų kūną veikiančių jėgų rezultanto elementarus darbas bus lygus elementariam kūno kinetinės energijos pokyčiui:
dA = dE k. (2,29)
Baigdami pažymime, kad kinetinė energija, kaip ir judėjimo greitis, yra santykinė. Pavyzdžiui, keleivio, sėdinčio traukinyje, kinetinė energija skirsis, jei atsižvelgsime į judėjimą kelio dangos arba vežimo atžvilgiu.
§2.7 Potenciali energija
Antrasis mechaninės energijos tipas yra potencinė energija – energija dėl kūnų sąveikos.
Potenciali energija charakterizuoja ne jokią kūnų sąveiką, o tik tą, kurią apibūdina jėgos, kurios nepriklauso nuo greičio. Dauguma jėgų (gravitacijos, elastingumo, gravitacijos jėgų ir kt.) yra būtent tokios; vienintelė išimtis yra trinties jėgos. Nagrinėjamų jėgų darbas nepriklauso nuo trajektorijos formos, o yra nulemtas tik jos pradinės ir galutinės padėties. Tokių jėgų uždaroje trajektorijoje atliktas darbas lygus nuliui.
Jėgos, kurių darbas nepriklauso nuo trajektorijos formos, o priklauso tik nuo pradinės ir galutinės materialaus taško (kūno) padėties, vadinamos. potencialios arba konservatyvios jėgos .
Jei kūnas sąveikauja su savo aplinka per potencialias jėgas, tada šiai sąveikai apibūdinti galima įvesti potencialios energijos sąvoką.
Potencialus yra energija, kurią sukelia kūnų sąveika ir priklauso nuo jų santykinės padėties.
Raskime virš žemės pakelto kūno potencinę energiją. Tegul kūnas, kurio masė yra m, tolygiai juda gravitaciniame lauke iš 1 padėties į 2 padėtį išilgai paviršiaus, kurio skerspjūvis pagal brėžinio plokštumą parodytas Fig. 2.8. Ši atkarpa yra materialaus taško (kūno) trajektorija. Jei trinties nėra, tašką veikia trys jėgos:
1) jėga N nuo paviršiaus yra normali paviršiui, šios jėgos darbas lygus nuliui;
2) gravitacija mg, šios jėgos darbas A 12;
3) traukos jėga F nuo kurio nors varančiojo kūno (vidaus degimo variklio, elektros variklio, žmogaus ir kt.); Šios jėgos darbą pažymėkime A T.
Panagrinėkime gravitacijos darbą judant kūną pasvirusia plokštuma, kurios ilgis ℓ (2.9 pav.). Kaip matyti iš šio paveikslo, darbas yra lygus
A" = mgℓ cosα = mgℓ cos(90° + α) = - mgℓ sinα
Iš trikampio ВСD turime ℓ sinα = h, taigi iš paskutinės formulės seka:
Kūno trajektorija (žr. 2.8 pav.) gali būti schematiškai pavaizduota mažomis pasvirusios plokštumos atkarpomis, todėl gravitacijos darbui visoje trajektorijoje 1 -2 galioja tokia išraiška:
A 12 = mg (h 1 - h 2) =-(mg h 2 - mg h 1) (2,30)
Taigi, gravitacijos darbas nepriklauso nuo kūno trajektorijos, o priklauso nuo trajektorijos pradžios ir pabaigos taškų aukščių skirtumo.
Dydis
e n = mg h (2,31)
paskambino potencinė energija materialus taškas (kūnas), kurio masė m, pakelta virš žemės į aukštį h. Todėl formulę (2.30) galima perrašyti taip:
A 12 = =-(En 2 - En 1) arba A 12 = =-ΔEn (2.32)
Gravitacijos darbas yra lygus kūnų, paimtų priešingu ženklu, potencinės energijos pokyčiui, t.y skirtumui tarp jo galutinio ir pradiniovertybes (potencialios energijos teorema ).
Panašiai samprotauti galima ir apie tampriai deformuotą kūną.
 (2.33)
(2.33)
Prisimink tai fizinę reikšmę turi potencialios energijos skirtumą kaip konservatyviųjų jėgų darbą lemiantį dydį. Šiuo atžvilgiu nesvarbu, kuriai pozicijai, konfigūracijai turėtų būti priskirta nulinė potenciali energija.
Iš potencialios energijos teoremos galima gauti vieną labai svarbią išvadą: Konservatyvios jėgos visada nukreiptos į potencialios energijos mažinimą. Nusistovėjęs modelis pasireiškia tuo, kad bet kuri sau palikta sistema visada linkusi pereiti į būseną, kurioje jos potenciali energija turi mažiausią vertę. Tai yra minimalios potencialios energijos principas .
Jei sistema tam tikroje būsenoje neturi minimalios potencialios energijos, tada ši būsena vadinama energetiškai nepalankus.
Jei rutulys yra įgaubto dubens apačioje (2.10 pav., a), kur jo potenciali energija yra minimali (palyginti su reikšmėmis gretimose pozicijose), tada jo būklė yra palankesnė. Rutulio pusiausvyra šiuo atveju yra tvarus: Jei pastumsite kamuolį į šoną ir atleisite, jis grįš į pradinę padėtį.
Pavyzdžiui, rutulio padėtis išgaubto paviršiaus viršuje yra energetiškai nepalanki (2.10 pav., b). Rutulį veikiančių jėgų suma lygi nuliui, todėl šis rutulys bus pusiausvyroje. Tačiau ši pusiausvyra yra nestabilus: pakanka menkiausio smūgio, kad jis nuriedėtų žemyn ir taip pereitų į energetiškai palankesnę būseną, t.y. turintys mažiau
P 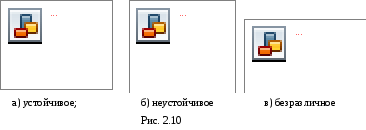 potencinė energija.
potencinė energija.
At abejingas Esant pusiausvyrai (2.10 pav., c) kūno potencinė energija lygi visų galimų artimiausių jo būsenų potencinei energijai.
2.11 paveiksle galite nurodyti tam tikrą ribotą erdvės sritį (pavyzdžiui, cd), kurioje potenciali energija yra mažesnė nei už jos ribų. Ši sritis buvo pavadinta potencialus šulinys .
Transliaciniu būdu judančio kieto kūno kinetinė energija nustatoma labai paprastai. Kadangi tokio judėjimo metu visi kūno taškai turi vienodą greitį, kinetinė energija tiesiog lygi (4)
kur yra kūno greitis, o M yra jo pilna masė. Ši išraiška yra tokia pati, tarsi vienas materialus taškas masės M judėtų greičiu. Akivaizdu, kad standaus kūno transliacinis judėjimas niekuo reikšmingai nesiskiria nuo materialaus taško judėjimo.
Dabar nustatykime besisukančio kūno kinetinę energiją. Norėdami tai padaryti, mintyse padalinkime jį į atskiras elementarias dalis, tokias mažas, kad jas būtų galima laikyti judančiais kaip materialiais taškais. Jei m i yra i-ojo elemento masė, o r i yra jo atstumas iki sukimosi ašies, tai jo greitis yra lygus , kur yra kūno kampinis sukimosi greitis. Šio elemento kinetinė energija yra lygi ir, susumavus šias energijas, gauname bendrą kūno kinetinę energiją (5)
Skliausteliuose nurodytas kiekis priklauso nuo to, su kokiu kietu kūnu susiduriame (jo formos, dydžio ir masių pasiskirstymo jame), taip pat nuo to, kaip jame yra sukimosi ašis. Šis dydis, apibūdinantis standųjį kūną ir pasirinktą sukimosi ašį, vadinamas inercijos momentas kūnai tam tikros ašies atžvilgiu.
Pažymėkime tai raide I: ![]() (6)
(6)
Jei kietas kūnas yra kietas, tai jis turi būti padalintas į be galo daug be galo mažų dalių; tada sumavimas rašytinėje formulėje pakeičiamas integravimu. Pavyzdžiui, nurodykime, kad kietojo rutulio (kurio masė M ir spindulys R) inercijos momentas ašies, einančios per jo centrą, atžvilgiu yra lygus ; plono strypo (ilgis l) inercijos momentas jam statmenos ašies, einančios per jos vidurį, atžvilgiu lygus .
Taigi, besisukančio kūno kinetinė energija gali būti parašyta kaip (7)
Ši išraiška formaliai panaši į transliacinio judėjimo energijos išraišką, nuo jos skiriasi tuo, kad vietoj greičio V yra kampinis greitis, o vietoj masės - inercijos momentas. Čia yra pirmasis pavyzdys, kad sukimosi metu inercijos momentas atlieka panašų vaidmenį kaip masė transliaciniame judesyje.
Savavališkai judančio standaus kūno kinetinė energija gali būti pavaizduota kaip transliacijos ir sukimosi energijų suma, jei dviejų judesių atskyrimo metodu pasirenkame pagrindinį tašką O kūno inercijos centre. Tada sukamasis judesys reprezentuos kūno taškų judėjimą jo inercijos centro atžvilgiu, ty jis atlieka „vidinio“ judėjimo vaidmenį. Todėl savavališkai judančio kūno kinetinei energijai turime ![]() (8)
(8)
Inercijos momento indeksas „0“ reiškia, kad jis paimtas ašies, einančios per inercijos centrą, atžvilgiu.
Apsvarstykite standųjį kūną, besisukantį aplink tam tikrą Z ašį, kuri nekerta inercijos centro. Šio judėjimo kinetinė energija yra ![]() , kur I yra inercijos momentas Z ašies atžvilgiu. Kita vertus, tą patį judėjimą galime laikyti transliacinio judėjimo su inercijos centro greičiu V ir sukimosi (tuo pačiu kampiniu greičiu) aplink ašis, einanti per inercijos centrą lygiagrečiai ašiai Z. Jei A yra inercijos centro atstumas nuo Z ašies, tada jo greitis V= a. Todėl kūno kinetinė energija taip pat gali būti pavaizduota forma
, kur I yra inercijos momentas Z ašies atžvilgiu. Kita vertus, tą patį judėjimą galime laikyti transliacinio judėjimo su inercijos centro greičiu V ir sukimosi (tuo pačiu kampiniu greičiu) aplink ašis, einanti per inercijos centrą lygiagrečiai ašiai Z. Jei A yra inercijos centro atstumas nuo Z ašies, tada jo greitis V= a. Todėl kūno kinetinė energija taip pat gali būti pavaizduota forma
Palyginę abi išraiškas, randame
Ši formulė jungia kūno inercijos momentą bet kurios ašies atžvilgiu su inercijos momentu kitos ašies atžvilgiu, lygiagrečiai pirmajai ir einančios per inercijos centrą (Huygenso-Šteinerio teorema). Akivaizdu, kad aš visada didesnis nei I 0 . Kitaip tariant, tam tikrai ašies krypčiai per inercijos centrą einančiai ašiai pasiekiama mažiausia inercijos momento reikšmė.
Kinetinė energija- skaliarinė funkcija, kuri yra materialaus taško judėjimo matas ir priklauso tik nuo nagrinėjamą fizinę sistemą sudarančių materialių taškų masės ir greičio modulio, mechaninės sistemos energijos, priklausomai nuo taško judėjimo greičio. jos taškai pasirinktoje atskaitos sistemoje. Transliacinio ir sukamojo judesio kinetinė energija dažnai išsiskiria.
Tiksliau tariant, kinetinė energija yra skirtumas tarp visos sistemos energijos ir jos ramybės energijos; taigi, kinetinė energija yra visos energijos dalis dėl judėjimo.
Paprastais žodžiais tariant, kinetinė energija yra energija, kurią kūnas turi tik judėdamas. Kai kūnas juda, kinetinė energija lygi nuliui.
Fizinė prasmė
Panagrinėkime sistemą, susidedančią iš vienos dalelės, ir parašykime antrąjį Niutono dėsnį:
Yra visų kūną veikiančių jėgų rezultantas.Skaliariai padauginkime lygtį iš dalelės poslinkio. Atsižvelgdami į tai, gauname:
Jei sistema uždara, tai yra, nėra sistemos išorės jėgų arba visų jėgų rezultatas lygus nuliui, tada  , ir vertę
, ir vertę
išlieka pastovus. Šis kiekis vadinamas kinetinė energija dalelių. Jei sistema yra izoliuota, tada kinetinė energija yra judėjimo integralas.
Absoliučiai standžiam kūnui visa kinetinė energija gali būti parašyta kaip transliacinio ir sukamojo judesio kinetinės energijos suma:
![]()
Kūno masė
Masinio kūno centro greitis
Inercijos momentas telakg m² ![]()
Kūno kampinis greitis. rad/s
Raskime kinetinę energiją įvairiems judėjimo atvejams:
1. Judėjimas į priekį
Visų sistemos taškų greičiai lygūs masės centro greičiui. Tada
Sistemos kinetinė energija transliacinio judėjimo metu yra lygi pusei sistemos masės ir masės centro greičio kvadrato sandaugos.
2. Sukamasis judėjimas(77 pav.)
Bet kurio kūno taško greitis:. Tada
![]()
arba naudojant formulę (15.3.1):
![]()
Kūno kinetinė energija sukimosi metu yra lygi kūno inercijos momento sukimosi ašies atžvilgiu ir jo kampinio greičio kvadrato sandaugai.
3. Plokštumos lygiagretus judėjimas
Tam tikro judėjimo kinetinė energija susideda iš transliacinių ir sukimosi judesių energijos
Bendrasis judesio atvejis suteikia kinetinės energijos skaičiavimo formulę, panašią į paskutinę.
Darbo ir galios apibrėžimą pateikėme 14 skyriaus 3 pastraipoje. Čia apžvelgsime mechaninę sistemą veikiančių jėgų darbo ir galios skaičiavimo pavyzdžius.
Fizinė darbo prasmė
Visų jėgų, veikiančių dalelę jos judėjimo metu, darbas padidina dalelės kinetinę energiją:
Kinetinės energijos savybės
Adityvumas.Ši savybė reiškia, kad mechaninės sistemos, susidedančios iš materialių taškų, kinetinė energija yra lygi visų į sistemą įtrauktų materialių taškų kinetinių energijų sumai.
Nekintamumas atskaitos sistemos sukimosi atžvilgiu. Kinetinė energija nepriklauso nuo taško padėties, jo greičio krypties ir priklauso tik nuo greičio dydžio arba, kas yra tas pats, nuo jo greičio kvadrato.
Konservavimas. Sąveikų, kurios keičia tik mechanines sistemos charakteristikas, metu kinetinė energija nekinta.Ši savybė yra nekintama Galilėjaus transformacijų atžvilgiu.Kinetinės energijos tvermės savybių ir antrojo Niutono dėsnio pakanka, kad būtų galima išvesti matematinę kinetinės energijos formulę.
Reliatyvizmas
Esant greičiui, artimam šviesos greičiui, bet kurio objekto kinetinė energija yra lygi
Objekto masė;
Objekto judėjimo greitis pasirinktoje inercinėje atskaitos sistemoje;
Šviesos greitis vakuume (-poilsio energija).
Šią formulę galima perrašyti taip:
Esant mažam greičiui (), paskutinis santykis tampa įprasta formule.
Kinetinės ir vidinės energijos ryšys
Kinetinė energija priklauso nuo padėties, iš kurios žiūrima į sistemą. Jei makroskopinį objektą (pavyzdžiui, kietą matomų matmenų kūną) laikysime viena visuma, galime kalbėti apie tokią energijos formą kaip vidinė energija. Kinetinė energija šiuo atveju atsiranda tik tada, kai kūnas juda kaip visuma.
Tas pats kūnas, vertinant mikroskopiniu požiūriu, susideda iš atomų ir molekulių, o vidinė energija atsiranda dėl atomų ir molekulių judėjimo ir yra laikoma šių dalelių šiluminio judėjimo pasekme, o absoliuti kūno temperatūra. kūnas yra tiesiogiai proporcingas tokio atomų ir molekulių judėjimo vidutinei kinetinei energijai. Proporcingumo koeficientas – Boltzmanno konstanta.



